
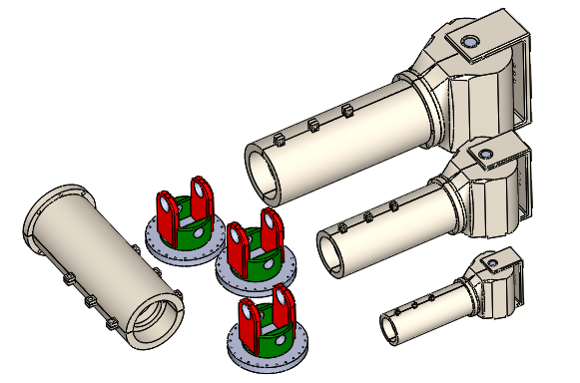
Customized Serial Manipulators using Unconventional Modular Libraries
- Task-based optimal customized manipulator configuration designs.
- Unconventional Modular library design to incorporate Modularity and Reconfigurability.
- Optimal Architecture planning and design of the modules based upon manipulator kinematics and dynamics
- Unified and Automatic Modeling and control of Modular and Reconfigurable Manipulators

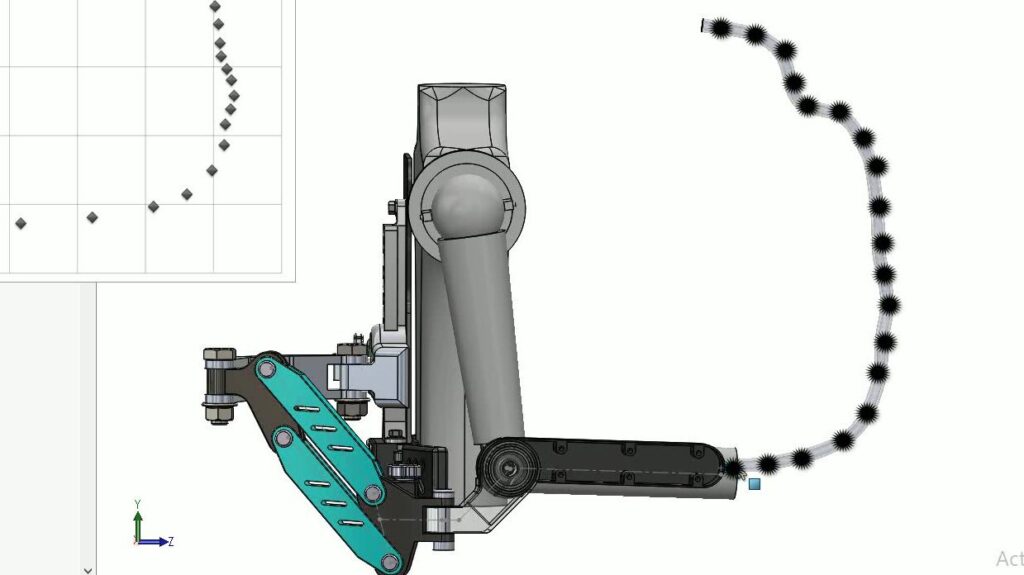
Rehabilitation Exoskeleton: Towards Modular Designs
- Task-based dimensional synthesis of wearable upper limb exoskeletons.
- Modular design of upper limb rehabilitation device.
- To cater the challenge of anatomical alignment and length adjustment.
- Optimal configuration selection of hybrid mechanism for exoskeleton design.
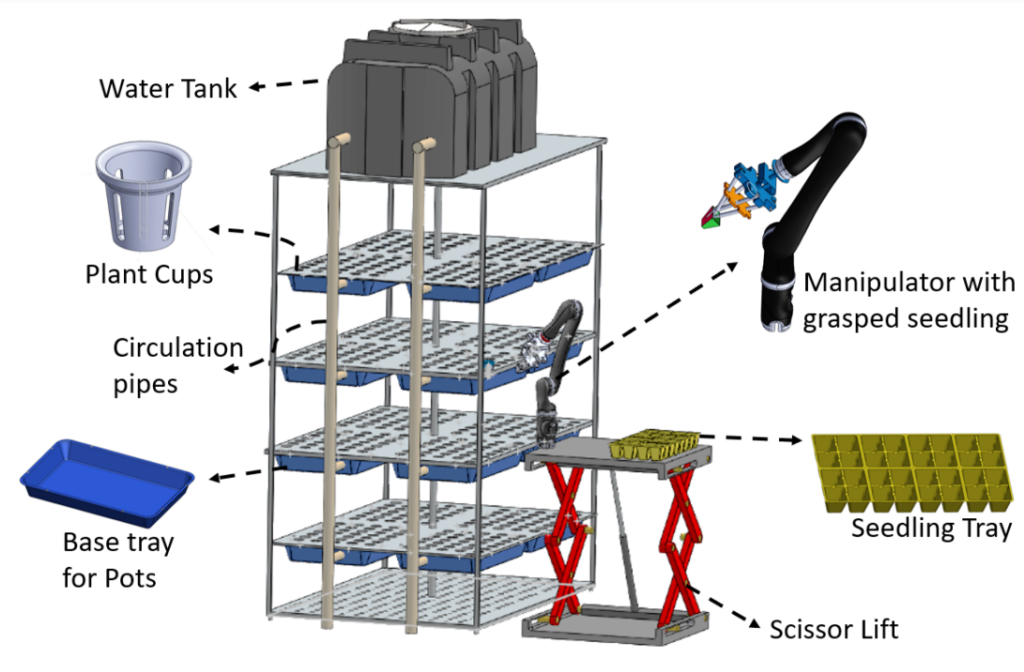
- Robotic Assistance in Agricultural fields.
- Task-oriented configuration design for vertical farms.
- Modular system design for Vertical agriculture farm set up
- Modular mobile manipulator design for vertical agriculture farm
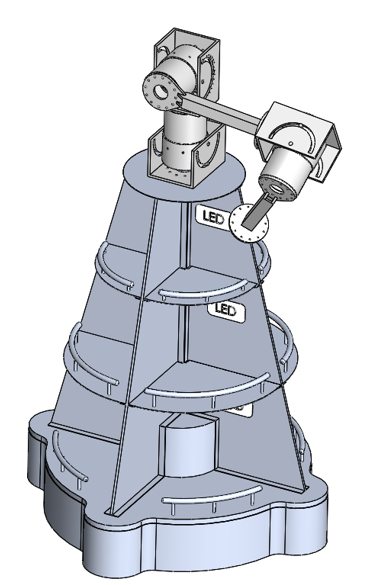
- Modular design of bio-inspired active camouflage skin for robots